Toyota CH-R Owners Manual: BSM function
The BSM function uses radar sensors to detect the following vehicles traveling in adjacent lanes and advises the driver of the presence of such vehicles via the indicators on the outside rear view mirrors.
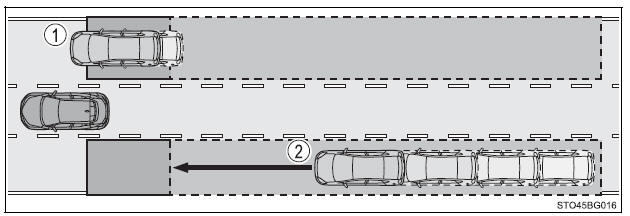
- Vehicles that are traveling in areas that are not visible using the outside rear view mirrors (the blind spots)
- Vehicles that are approaching rapidly from behind in areas that are not visible using the outside rear view mirrors (the blind spots)
BSM function detection areas
The areas that vehicles can be detected in are outlined below.
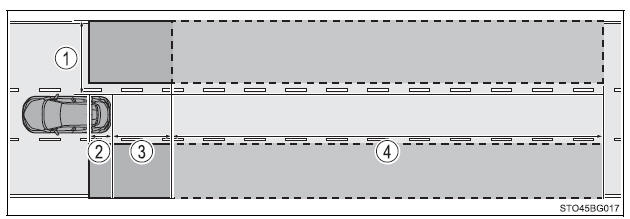
The range of each detection area is:
- Approximately 1.6 ft. (0.5 m) to 11.5 ft. (3.5 m) from either side of the vehicle*
*: The area between the side of the vehicle and 1.6 ft. (0.5 m) from the side of the vehicle cannot be detected.
- Approximately 3.3 ft. (1 m) forward of the rear bumper
- Approximately 9.8 ft. (3 m) from the rear bumper
- Approximately 9.8 ft. (3 m) to 197 ft. (60 m) from the rear bumper*
*: The greater the difference in speed between your vehicle and the detected vehicle is, the farther away the vehicle will be detected, causing the outside rear view mirror indicator to illuminate or flash.
■Cautions regarding the use of the system The driver is solely responsible for safe driving. Always drive safely, taking care to observe your surroundings.
The Blind Spot Monitor function is a supplementary function which alerts the driver that a vehicle is present in the blind spot. Do not overly rely on the Blind Spot Monitor function. The function cannot judge if it is safe to change lanes, therefore over reliance could cause an accident resulting in death or serious injury.
According to conditions, the system may not function correctly. Therefore the driver's own visual confirmation of safety is necessary.
■The BSM function is operational when The BSM function is operational when all of the following conditions are met:
- The BSM system is set to on
- The shift lever is in a position other than R.
- Vehicle speed is greater than approximately 10 mph (16 km/h)
■The BSM function will detect a vehicle when The BSM function will detect a vehicle present in the detection area in the following situations:
- A vehicle in an adjacent lane overtakes your vehicle.
- You overtake a vehicle in adjacent lane slowly.
- Another vehicle enters the detection area when it changes lanes.
■Conditions under which the BSM function will not detect a vehicle The BSM function is not designed to detect the following types of vehicles and/or objects:
- Small motorcycles, bicycles, pedestrians, etc.*
- Vehicles traveling in the opposite direction
- Guardrails, walls, signs, parked vehicles and similar stationary objects*
- Following vehicles that are in the same lane*
- Vehicles traveling 2 lanes away from your vehicle*
*: Depending on conditions, detection of a vehicle and/or object may occur.
■Conditions under which the BSM function may not function correctly
- The BSM function may not detect vehicles correctly in the following situations:
- When the sensor is misaligned due to a strong impact to the sensor or its surrounding area
- When mud, snow, ice, a sticker, etc., is covering the sensor or surrounding area on the rear bumper
- When driving on a road surface that is wet with standing water during bad weather, such as heavy rain, snow, or fog
- When multiple vehicles are approaching with only a small gap between each vehicle
- When the distance between your vehicle and a following vehicle is short
- When there is a significant difference in speed between your vehicle and the vehicle that enters the detection area
- Vehicles which are being overtaken rapidly by your vehicle.
- When the difference in speed between your vehicle and another vehicle is changing
- When a vehicle enters a detection area traveling at about the same speed as your vehicle
- As your vehicle starts from a stop, a vehicle remains in the detection area
- When driving up and down consecutive steep inclines, such as hills, dips in the road, etc.
- When driving on roads with sharp bends, consecutive curves, or uneven surfaces
- When vehicle lanes are wide, or when driving on the edge of a lane, and the vehicle in an adjacent lane is far away from your vehicle
- When a bicycle carrier or other accessory is installed to the rear of the vehicle
- When there is a significant difference in height between your vehicle and the vehicle that enters the detection area
- Immediately after BSM system is set to on
- Instances of the BSM function unnecessarily detecting a vehicle and/or object
may increase in the following situations:
- When the sensor is misaligned due to a strong impact to the sensor or its surrounding area
- When the distance between your vehicle and a guardrail, wall, etc., that enters the detection area is short
- When driving up and down consecutive steep inclines, such as hills, dips in the road, etc.
- When vehicle lanes are narrow, or when driving on the edge of a lane, and a vehicle traveling in a lane other than the adjacent lanes enters the detection area
- When driving on roads with sharp bends, consecutive curves, or uneven surfaces
- When the tires are slipping or spinning
- When the distance between your vehicle and a following vehicle is short
- When a bicycle carrier or other accessory is installed to the rear of the vehicle
 Turning the BSM function/RCTA function on/off
Turning the BSM function/RCTA function on/off
Press ""
or ""
of the meter control switches, select
.
Press ""
or ""
of the meter control switches, select
.
Press ""
or &q ...
 RCTA function
RCTA function
The RCTA functions when your vehicle is in reverse. It can detect other vehicles
approaching from the right or left rear of the vehicle. It uses radar sensors to
alert the driver of the other vehi ...
Other materials:
Toyota CH-R Service Manual > Front Seat Assembly: Installation
INSTALLATION
CAUTION / NOTICE / HINT
CAUTION:
Be sure to read Precaution thoroughly before servicing.
Click here
Wear protective gloves. Sharp areas on the parts may injure your hands.
HINT:
Use the same procedure for the driver side and front passen ...
Toyota CH-R Service Manual > Smart Key System(for Entry Function): Front Passenger Side Door Entry Lock Function does not Operate
DESCRIPTION
If the entry lock function does not operate for the front passenger door only,
but the entry unlock function operates, the request code is being transmitted properly
from the for passenger door. In this case, there may be a problem related to the
lock sensor (connection between th ...
Toyota C-HR (AX20) 2023-2026 Owner's Manual
Toyota CH-R Owners Manual
- For safety and security
- Instrument cluster
- Operation of each component
- Driving
- Interior features
- Maintenance and care
- When trouble arises
- Vehicle specifications
- For owners
Toyota CH-R Service Manual
- Introduction
- Maintenance
- Audio / Video
- Cellular Communication
- Navigation / Multi Info Display
- Park Assist / Monitoring
- Brake (front)
- Brake (rear)
- Brake Control / Dynamic Control Systems
- Brake System (other)
- Parking Brake
- Axle And Differential
- Drive Shaft / Propeller Shaft
- K114 Cvt
- 3zr-fae Battery / Charging
- Networking
- Power Distribution
- Power Assist Systems
- Steering Column
- Steering Gear / Linkage
- Alignment / Handling Diagnosis
- Front Suspension
- Rear Suspension
- Tire / Wheel
- Tire Pressure Monitoring
- Door / Hatch
- Exterior Panels / Trim
- Horn
- Lighting (ext)
- Mirror (ext)
- Window / Glass
- Wiper / Washer
- Door Lock
- Heating / Air Conditioning
- Interior Panels / Trim
- Lighting (int)
- Meter / Gauge / Display
- Mirror (int)
- Power Outlets (int)
- Pre-collision
- Seat
- Seat Belt
- Supplemental Restraint Systems
- Theft Deterrent / Keyless Entry

0.0095